xDR Challenge 2025
2025年09月10日
概要
xDR Challenge 2025 に参加しました
https://unit.aist.go.jp/rihsa/xDR-Challenge-2025/index.html
xDR技術の向上を目的とした国際コンペティションであり,センサを使用して位置推定を行います.
今回は日本科学未来館のような展示場において視覚障害者が補助ロボットを用いて展示を周るのを想定しており,UWB・VIO・PDRなどの技術を用いて9月10日の競争にリアルタイムで位置推定をする必要があります.
リアルタイムで推定する必要がある点や,UWBやVIOが使えないエリアがあるといった制約により非常に難易度が高かったです.
梶研究室のB4が1人と私を含めたB3が4人で参加しました.
自分の役割
今回私は主に実装環境の構築,VIOによる位置推定,プロジェクト全般のレビュー・補助,PDR班(他B3)への指示や補助を担当しました.
B4の先輩がUWB,他B3の3人がPDRを担当しました.
VIOでは位置を高精度で取得できる一方で開始位置からの相対位置しか取得できず,初期の進行方向もわかりません
そのためロボットの絶対位置を示す GPOS や ロボットからの相対位置を得られる UWB を元に絶対位置や進行方向を推定する必要がありました.
私以外はプログラムや位置推定について知見が深くない場合があり実装の流れのアドバイスやプログラムの改善などを行いました.
また,本コンペティションにおいて与えられるサンプル環境は最小限であり,実装中のデモなどにおいて実行に時間が掛かるといった負担や実装を分けづらいといった問題があるため,より実装しやすいようにオリジナルの環境を構築しました.
また,PDR班はPDRを行ないのが初めてということもあり,PDRだけに専念できる環境の構築なども行いました.
他にも,リアルタイムという制約上,実行時間を0.5秒に抑える必要がありこの点でプログラムの改善などを行いました.
リポジトリ
本番環境: https://github.com/kajiLabTeam/xdr_challenge_2025
PDR練習環境: https://github.com/kajiLabTeam/xdr-challenge-pdr-practice-environment
結果
結果は最終的に生き残った 4チーム中3位とあまり良い成績ではありませんでした
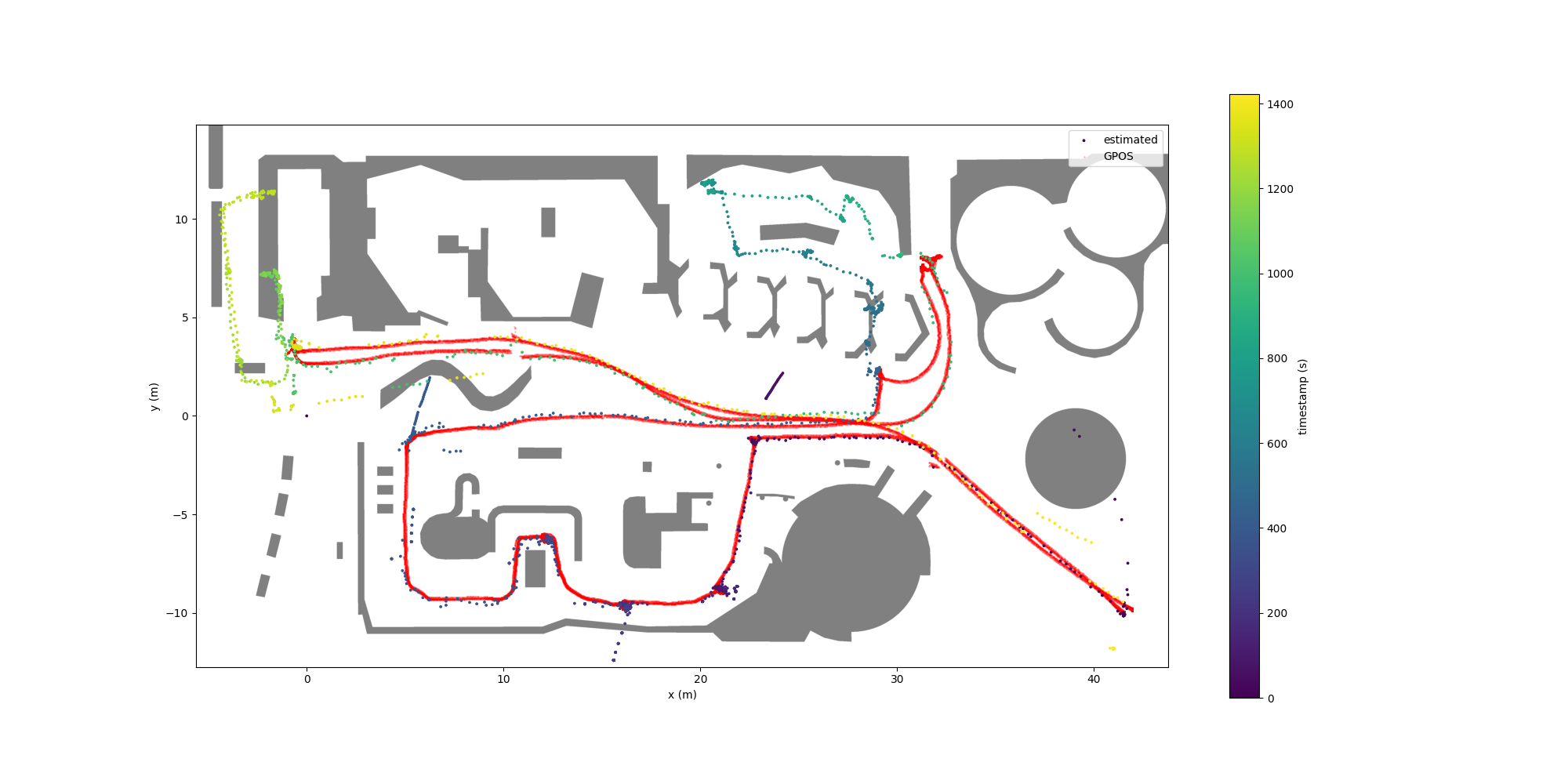
上手くいった方のトライアル
右上や左上の展示がVIOがメインとして使われている箇所
初期進行方向があまり上手くいっておらずズレが目立つ
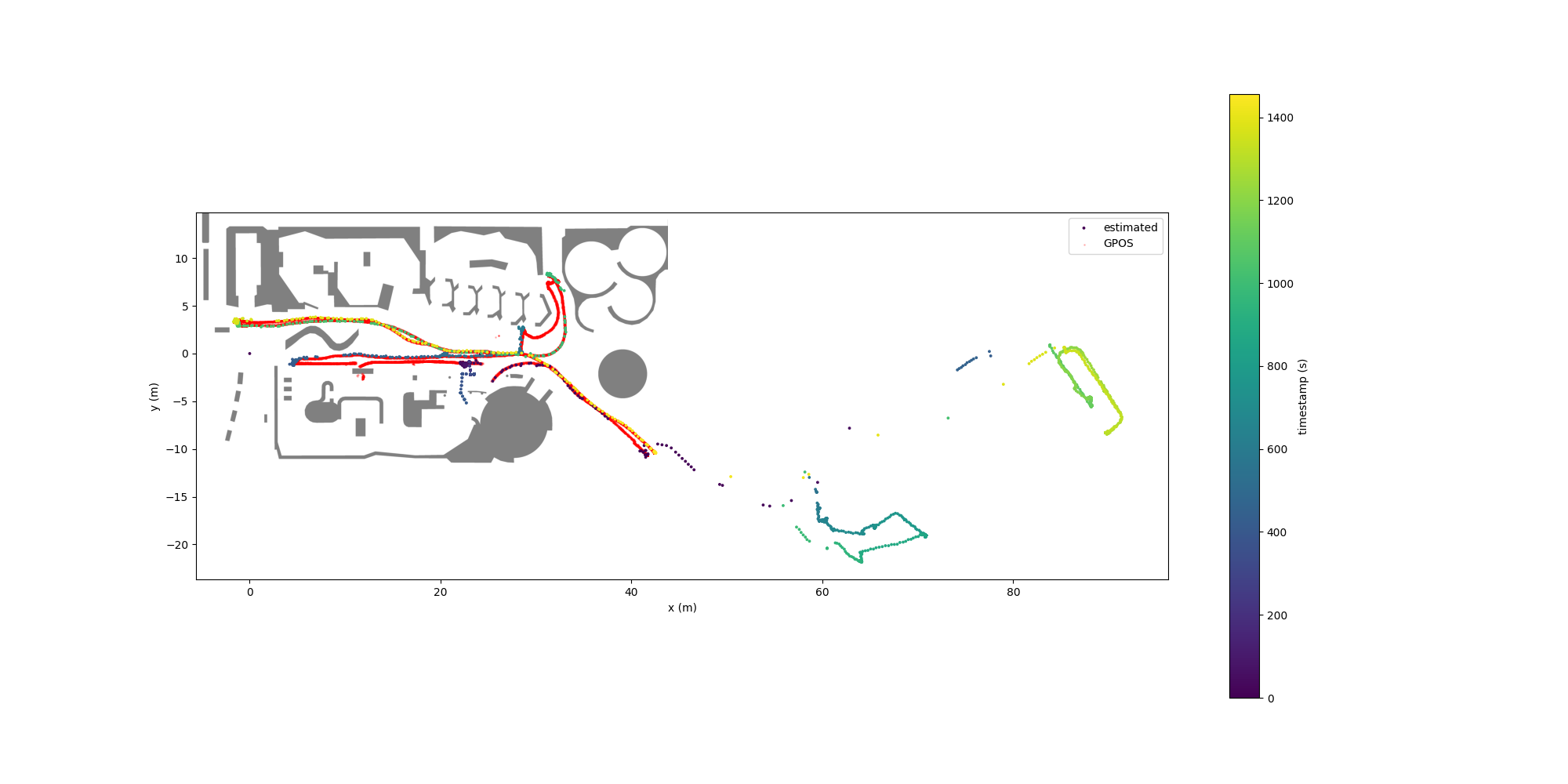
上手くいかなかった方のトライアル
全体として初期進行方向がおかしい
感想
これまでB1のころより研究室にてPDRによる位置推定も学んできたものの,普段は行動分類がメイン
実践する機会はなかったため参加しました.
結果はあまり良くなかったものの自分の担当の範囲だけでなく他メンバーの補助もありとても苦労しましたが,最後まで走り切ることができてよかったです.
また,他B3に対して位置推定について教える中で普段のプロダクト開発とは違い実装したのちにどう進めればよいかなどがとても苦労しました.
ICMU と同時進行で進めており,どちらか片方にすればよかったと後悔した一方で,自分の限界を知られてよかったです